
Det højre hånd regel er en hukommelsesressource til at bestemme retningen og følelsen af vektoren, der stammer fra et vektorprodukt eller krydsprodukt. Det bruges i vid udstrækning i fysik, da der er vigtige vektormængder, der er resultatet af et vektorprodukt. Sådan er for eksempel drejningsmoment, magnetisk kraft, vinkelmoment og magnetisk moment.
Lad være to generiske vektorer til Y b hvis krydsprodukt er til x b. Modulet til en sådan vektor er:
til x b = a.b. i α
Hvor α er den mindste vinkel mellem til Y b, mens a og b repræsenterer dets moduler. For at skelne vektorerne i deres moduler bruges der fed skrift.
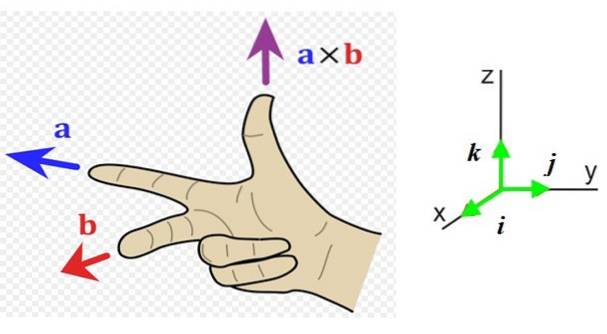
Nu skal vi kende retningen og følelsen af denne vektor, så det er praktisk at have et referencesystem med de tre retninger af rummet (figur 1 til højre). Enhedsvektorerne jeg, j Y k de peger henholdsvis mod læseren (fra siden), til højre og op.
I eksemplet i figur 1 til venstre, vektoren til hoveder mod venstre (retning Y negativ og pegefinger på højre hånd) og vektoren b går til læseren (retning x positiv, langfinger på højre hånd).
Den resulterende vektor til x b har tommelfingerretningen opad i retningen z positiv.
Artikelindeks
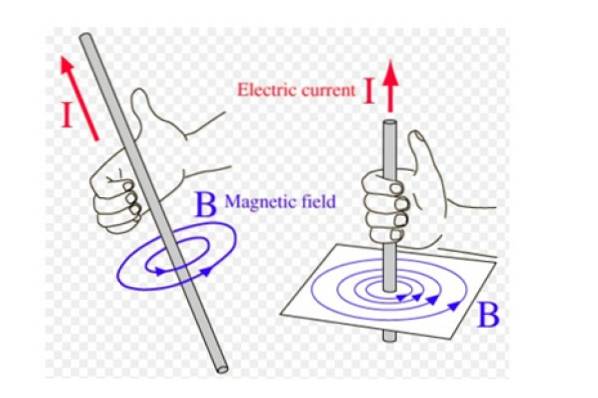
Denne regel, også kaldet højre tommelfingerregel, Det bruges meget, når der er størrelser, hvis retning og retning roterer, såsom magnetfeltet B produceret af en tynd, lige ledning, der bærer en strøm.
I dette tilfælde er magnetfeltlinjerne koncentriske cirkler med ledningen, og rotationsretningen opnås med denne regel på følgende måde: højre tommelfinger peger i strømens retning og de resterende fire fingre er buet i retning af landskabet. Vi illustrerer konceptet i figur 2.
Figuren nedenfor viser en alternativ form for højrehåndsreglen. Vektorerne, der vises i illustrationen, er:
-Fart v af en punktafgift q.
-Magnetfelt B inden for hvilken lasten bevæger sig.
-FB den kraft, som magnetfeltet udøver på ladningen.
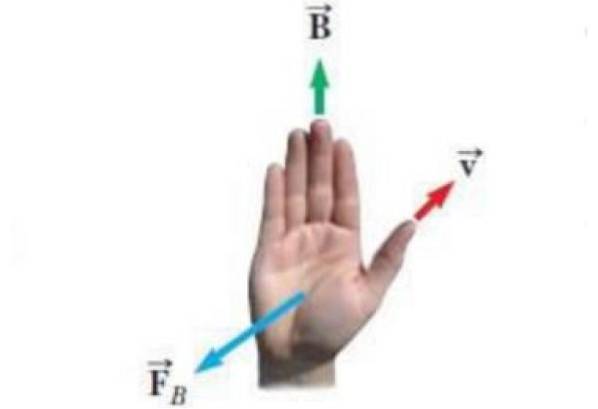
Ligningen for den magnetiske kraft er FB = qv x B og reglen om højre hånd til at kende retningen og følelsen af FB anvendes således: tommelfingeren peger i henhold til v, de fire resterende fingre placeres i henhold til felt B. Derefter FB er en vektor, der kommer ud af håndfladen, vinkelret på den, som om den skubber belastningen.
Noter det FB Jeg vil pege i den modsatte retning hvis opladningen q var negativ, da vektorproduktet ikke er kommutativt. Faktisk:
til x b = - b x til
Højrehåndsreglen kan anvendes til forskellige fysiske størrelser, lad os kende nogle af dem:
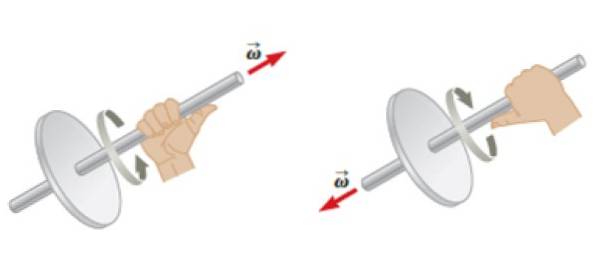
Begge vinkelhastigheder ω som vinkelacceleration a de er vektorer. Hvis et objekt roterer omkring en fast akse, er det muligt at tildele retningen og følelsen af disse vektorer ved hjælp af højre håndregel: de fire fingre krølles efter rotation og tommelfingeren giver straks retningen og følelsen af vinkelhastighed ω.
For sin del vinkelacceleration a vil have samme adresse som ω, men dens betydning afhænger af, om ω øges eller falder i størrelse over tid. I det første tilfælde har begge samme retning og forstand, men i det andet vil de have modsatte retninger..
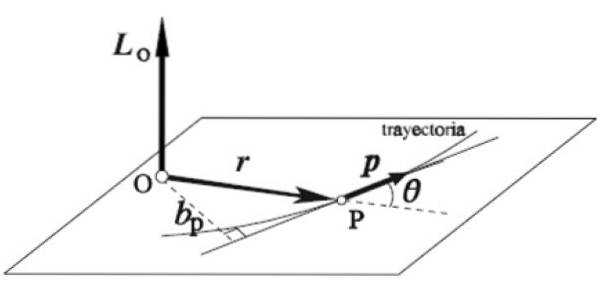
Vinkelmomentvektoren LELLER af en partikel, der roterer omkring en bestemt akse O, er defineret som vektorproduktet fra dets øjeblikkelige positionsvektor r og det lineære momentum s:
L = r x s
Højrehåndsreglen anvendes på denne måde: pegefingeren placeres i samme retning og følelse af r, langfingeren på den af s, begge på et vandret plan, som på figuren. Tommelfingeren strækkes automatisk lodret opad, hvilket indikerer retningen og følelsen af vinkelmoment LELLER.
Toppen i figur 6 drejer hurtigt med vinkelhastighed ω og symmetriaksen roterer langsommere omkring den lodrette akse z. Denne bevægelse kaldes presession. Beskriv de kræfter, der virker på snurretoppen og den effekt, de producerer.
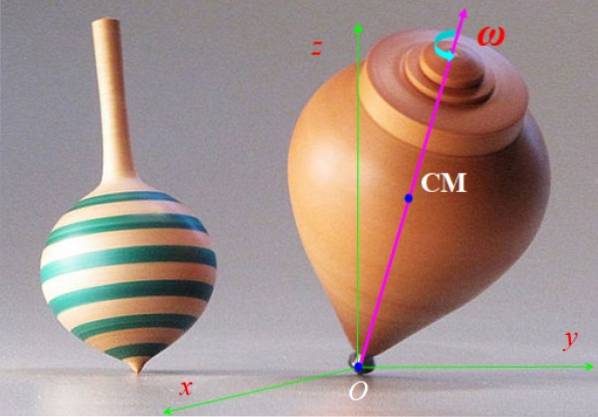
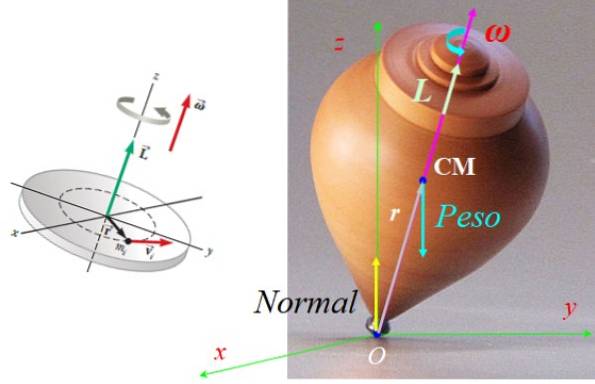
De kræfter, der virker på toppen, er normale N, påført på omdrejningspunktet med jorden O plus vægten Mg, anvendt i centrum af masse CM med g tyngdekraftens accelerationsvektor, lodret lodret nedad (se figur 7).
Begge kræfter balancerer, derfor bevæger toppen sig ikke. Vægten producerer dog et drejningsmoment eller drejningsmoment τ netto med hensyn til punkt O, givet af:
τELLER = rELLER x F, med F = Mg.
Hvad r og Mg de er altid i samme plan som toppen roterer, i henhold til højre hånd drejningsmomentet τELLER er altid placeret på flyet xy, vinkelret på begge dele r Hvad g.
Noter det N producerer ikke et drejningsmoment i forhold til O, fordi dens vektor r med hensyn til O er nul. Dette drejningsmoment frembringer en ændring i vinkelmomentet, der får toppen til at gå foran Z-aksen..
Angiv retningen og følelsen af den vinkelmomentvektor L på toppen af figur 6.
Ethvert punkt på toppen har masse mjeg, hastighed vjeg og placeringsvektor rjeg, når den roterer omkring z-aksen. Vinkelmoment Ljeg af nævnte partikel er:
Ljeg = rjeg x sjeg = rjeg x mjegvjeg
På grund af rjeg Y vjeg er vinkelrette, størrelsen af L det er:
Ljeg = mjegrjegvjeg
Lineær hastighed v er relateret til vinkelhastigheden ω igennem:
vjeg = rjegω
Derfor:
Ljeg = mjegrjeg (rjegω) = mjegrjegtoω
Den samlede vinkelmoment for roterende top L er summen af vinkelmomentet for hver partikel:
L = (∑mjegrjegto ) ω
∑ mjegrjegto er inerti-øjeblikket I fra toppen, så:
L= Jegω
Derfor L Y ω har samme retning og forstand som vist i figur 7.


Endnu ingen kommentarer