Det mekanisk fordel det er den dimensionsløse faktor, der kvantificerer en mekanismes evne til at forstærke - i nogle tilfælde mindske - den kraft, der udøves gennem den. Konceptet gælder for enhver mekanisme: fra et saks til en sportsbilmotor.
Ideen er, at en maskine omdanner den kraft, som brugeren anvender på den, til en meget større kraft, der repræsenterer fortjeneste, eller reducerer den til at udføre en delikat opgave.

Det skal huskes, at når en mekanisme betjenes, investeres en del af den kraft, der anvendes uundgåeligt i modvirkning af friktion. Derfor klassificeres den mekaniske fordel i faktisk mekanisk fordel og ideel mekanisk fordel..
Artikelindeks
Den faktiske mekaniske fordel ved en maskine defineres som forholdet mellem størrelsen af den kraft, som maskinen udøver på belastningen (udgangskraft), og den krævede kraft til at betjene maskinen (indgangskraft):
Virkelig mekanisk fordel VMR = udgangskraft / indgangskraft
Mens den ideelle mekaniske fordel for sin del afhænger af den tilbagelagte afstand med inputkraften og den tilbagelagte afstand med outputkraften:
Ideel mekanisk fordel VMI = indgangsafstand / udløbsafstand
At være kvotienter mellem størrelser med de samme dimensioner, begge fordele er dimensionsløse (uden enheder) og også positive.
I mange tilfælde, såsom trillebør og hydraulisk presse, er den mekaniske fordel større end 1, og i andre er den mekaniske fordel mindre end 1, for eksempel i fiskestangen og griberne..
VMI er relateret til det mekaniske arbejde, der udføres ved ind- og udgang af en maskine. Arbejdet ved indgangen, som vi kalder Wjeg, den er opdelt i to komponenter:
Wjeg = Arbejd for at overvinde friktion + Træn
En ideel maskine behøver ikke arbejde for at overvinde friktion, derfor vil arbejdet ved indgangen være det samme som ved output, betegnet som Weller:
Arbejde ved indrejse = Arbejde ved udgang → Wjeg = Weller.
Da arbejdet i dette tilfælde er kraft gange afstand, har vi: Wjeg = Fjeg . sjeg
Hvor Fjeg og jajeg er henholdsvis den oprindelige kraft og afstand. Outputarbejdet udtrykkes analogt:
Weller= Feller . seller
I dette tilfælde Feller og jaeller er henholdsvis kraften og afstanden, som maskinen leverer. Nu matches begge job:
Fjeg . sjeg = Feller . seller
Og resultatet kan omskrives i form af kvoter af kræfter og afstande:
(sjeg / seller) = (Feller / Fjeg)
Netop afstandskvotienten er den ideelle mekaniske fordel ifølge definitionen i starten:
VMI = sjeg / seller
Det er rimeligt at tænke på effektiviteten af transformationen mellem begge job: input og output. Betegner som og til effektivitet defineres dette som:
e = Output arbejde / Input arbejde = Weller / Wjeg = Feller . seller / Fjeg . sjeg
Effektivitet er også kendt som mekanisk ydeevne. I praksis overstiger output-arbejdet aldrig input-arbejdet på grund af friktionstab, derfor kvotienten givet af og er ikke længere lig med 1, men mindre.
En alternativ definition involverer magt, hvilket er arbejdet pr. Tidsenhed:
e = Effekt / Effekt = Peller / Pjeg
Den faktiske mekaniske fordel defineres simpelthen som kvotienten mellem udgangskraften Feller og input Fjeg:
VMR = Feller/ Fjeg
Effektivitet og kan omskrives i form af VMI og VMR:
e = Feller . seller / Fjeg . sjeg = (Feller / Fjeg(seller/ sjeg) = VMR / VMI
Derfor er effektiviteten kvotienten mellem den reelle mekaniske fordel og den ideelle mekaniske fordel, idet førstnævnte er mindre end sidstnævnte..
I praksis beregnes VMR ved at bestemme effektiviteten og kende VMI:
VMR = e. VMI
Beregningen af den mekaniske fordel afhænger af maskintypen. I nogle tilfælde skal det udføres ved transmission af kræfter, men i andre typer maskiner, som f.eks. Remskiver, er det drejningsmomentet eller momentet τ, der transmitteres.
I dette tilfælde beregnes VMI ved at sidestille øjeblikke:
Output moment = Input moment
Størrelsen af momentet er τ = F.r.sen θ. Hvis kraften og positionsvektoren er vinkelret, er der mellem dem en vinkel på 90º og sin θ = sin 90º = 1, hvilket opnår:
Feller . reller = Fjeg . rjeg
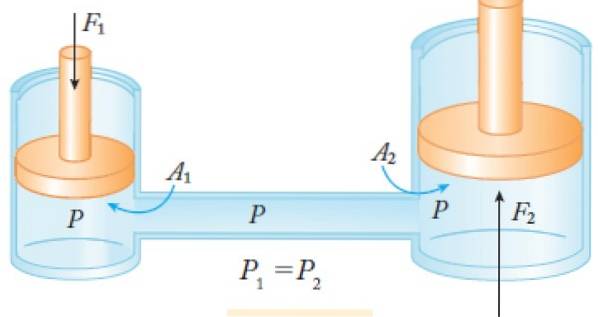
I mekanismer som den hydrauliske presse, som består af to kamre, der er forbundet med hinanden med et tværgående rør og fyldt med en væske, kan trykket overføres ved frit bevægelige stempler i hvert kammer. I så fald beregnes VMI af:
Udgangstryk = Indgangstryk
Håndtaget består af en tynd stang understøttet af en understøtning kaldet en omdrejningspunkt, som kan placeres på forskellige måder. Ved at anvende en bestemt kraft, kaldet "magtkraft", overvindes en meget større kraft, som er belastning eller udholdenhed.

Der er flere måder at lokalisere omdrejningspunktet, kraften og belastningen for at opnå en mekanisk fordel. Figur 3 viser førsteklasses håndtag, der ligner en vippebånd, med omdrejningspunktet placeret mellem kraften og belastningen..
For eksempel kan to personer med forskellig vægt være afbalanceret på vippen eller op og ned hvis de sidder i tilstrækkelig afstand fra omdrejningspunktet.
For at beregne VMI for første graders håndtag, da der ikke er nogen oversættelse og ingen friktion overvejes, men der er rotation, udlignes momentene, idet de ved, at begge kræfter er vinkelret på stangen. Her Fjeg er magtkraften og Feller er belastningen eller modstanden:
Feller . reller = Fjeg . rjeg
Feller / Fjeg = rjeg / reller
Per definition VMI = Feller / Fjeg , derefter:
VMI = rjeg / reller
I mangel af friktion: VMI = VMR. Bemærk, at VMI kan være større eller mindre end 1.
Den ideelle mekaniske fordel ved den hydrauliske presse beregnes gennem trykket, der ifølge Pascals princip overføres fuldt ud til alle punkter i væsken, der er indesluttet i beholderen..
Indgangskraften F1 i figur 2 påføres det på det lille stempel i område A1 til venstre og udgangskraften Fto opnås i det store stempel i område Ato til højre. Derefter:
Indgangstryk = Udgangstryk
Tryk defineres som kraft pr. Arealenhed, derfor:
(F1 / TIL1) = (Fto / TILto) → Ato / TIL1 = Fto / F1
Da VMI = Fto / F1, den mekaniske fordel opnås gennem kvotienten mellem områderne:
VMI = Ato / TIL1
Synes godt omto > A1, VMI er større end 1, og pressens virkning er at multiplicere kraften, der påføres det lille stempel F1.

Endnu ingen kommentarer